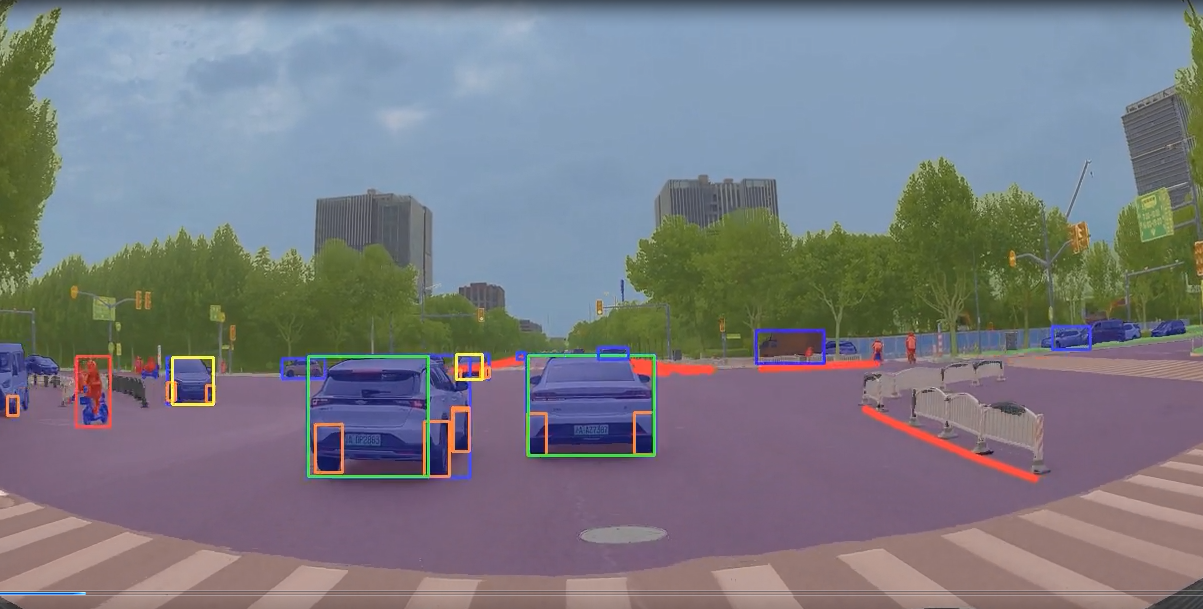
基於(yu) 深度學習(xi) 技術,覆蓋智能駕駛全鏈路,從(cong) 感知、多模態融合、高精度定位到規劃控製實現全棧自研,突破行業(ye) 技術瓶頸。支持BEV(鳥瞰圖)前融合感知與(yu) 端到端算法,結合自研模型訓練框架,確保算法在複雜場景下的高可靠性與(yu) 實時性,適配乘用車、商用車等多樣化需求。
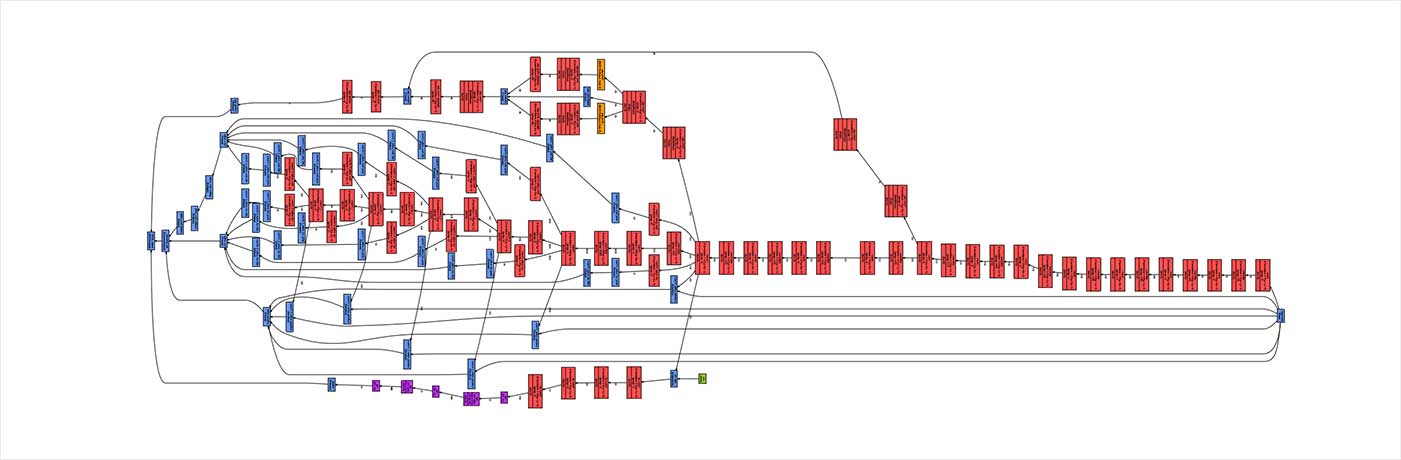
深度神經網絡結構示意圖

第一名,ICDAR 2015 Challenge 2 “Focused Scene Text”(2016)
第一名,Cityscapes Semantic Segmentation(2017)
第一名,Kitti Object Detection (Car)(2017)
第一名,PASCAL VOC Semantic Pixel Labelling(2017)
第一名,Large Scale 3D Human Activity Analysis Challenge in Depth Videos(2017)